Sneddon’s Problem
Objectives
At the end of this example you will know:
how to define fractures in a porous medium,
how to use various solvers (EmbeddedFractures, LagrangianContact and HydroFracture) to solve the mechanics problems with fractures.
Input file
This example uses no external input files and everything required is contained within GEOS input files.
The xml input files for the case with EmbeddedFractures solver are located at:
inputFiles/efemFractureMechanics/Sneddon_embeddedFrac_base.xml
inputFiles/efemFractureMechanics/Sneddon_embeddedFrac_verification.xml
The xml input files for the case with LagrangianContact solver are located at:
inputFiles/lagrangianContactMechanics/Sneddon_base.xml
inputFiles/lagrangianContactMechanics/Sneddon_benchmark.xml
inputFiles/lagrangianContactMechanics/ContactMechanics_Sneddon_benchmark.xml
The xml input files for the case with HydroFracture solver are located at:
inputFiles/hydraulicFracturing/Sneddon_hydroFrac_base.xml
inputFiles/hydraulicFracturing/Sneddon_hydroFrac_benchmark.xml
Description of the case
We compute the displacement field induced by the presence of a pressurized fracture,
of length  , in a porous medium.
, in a porous medium.
GEOS will calculate the displacement field in the porous matrix and the displacement
jump at the fracture surface.
We will use the analytical solution for the fracture aperture,  (normal component of the
jump), to verify the numerical results
(normal component of the
jump), to verify the numerical results

where
-  is the Young’s modulus
-
is the Young’s modulus
-  is the Poisson’s ratio
-
is the Poisson’s ratio
-  is the fracture pressure
-
is the fracture pressure
-  is the local fracture coordinate in
is the local fracture coordinate in ![[-\frac{L_f}{2}, \frac{L_f}{2}]](../../../../../../_images/math/00bf14094f4628ea619e8a8135bb78281234d9e7.svg)
In this example, we focus our attention on the Solvers, the ElementRegions, and the Geometry tags.
Mechanics solver
To define a mechanics solver capable of including embedded fractures, we will
define a SolidMechanicsEmbeddedFractures solver, called mechSolve.
Note that the name attribute of the solver is chosen by the user and is not imposed by GEOS.
Additionally, we need to specify another solver of type, EmbeddedSurfaceGenerator, which is used to discretize the fracture planes.
<SolidMechanicsEmbeddedFractures
name="mechSolve"
targetRegions="{ Domain, Fracture }"
initialDt="10"
discretization="FE1"
logLevel="1"
contactPenaltyStiffness="0.0e8">
<NonlinearSolverParameters
newtonTol="1.0e-6"
newtonMaxIter="4"
maxTimeStepCuts="1"/>
<LinearSolverParameters
solverType="gmres"
preconditionerType="mgr"
logLevel="0"/>
</SolidMechanicsEmbeddedFractures>
<EmbeddedSurfaceGenerator
name="SurfaceGenerator"
discretization="FE1"
targetRegions="{ Domain, Fracture }"
fractureRegion="Fracture"
targetObjects="{ FracturePlane }"
logLevel="1"
mpiCommOrder="1"/>
</Solvers>
To setup a coupling between rock and fracture deformations in LagrangianContact solver, we define two different solvers:
For solving the frictional contact and rock deformations, we define a Lagrangian contact solver, called here
lagrangiancontact. In this solver, we specifytargetRegionsthat include both the continuum regionRegionand the discontinuum regionFracturewhere the solver is applied to couple rock and fracture deformations. The contact constitutive law used for the fracture elements is namedfrictionLaw, and is defined later in theConstitutivesection.The solver
SurfaceGeneratordefines the fracture region and rock toughness.
<SolidMechanicsLagrangeContact
name="lagrangiancontact"
stabilizationName="TPFAstabilization"
logLevel="1"
discretization="FE1"
targetRegions="{ Region, Fracture }">
<NonlinearSolverParameters
newtonTol="1.0e-8"
logLevel="2"
newtonMaxIter="10"
maxNumConfigurationAttempts="10"
lineSearchAction="Require"
lineSearchMaxCuts="2"
maxTimeStepCuts="2"/>
<LinearSolverParameters
solverType="direct"
directParallel="1"
logLevel="0"/>
</SolidMechanicsLagrangeContact>
</Solvers>
Three elementary solvers are combined in the solver Hydrofracture to model the coupling between fluid flow within the fracture, rock deformation, fracture opening/closure and propagation:
Rock and fracture deformation are modeled by the solid mechanics solver
SolidMechanicsLagrangianFEM. In this solver, we definetargetRegionsthat includes both the continuum region and the fracture region. The name of the contact constitutive behavior is also specified in this solver by thecontactRelationName.The single phase fluid flow inside the fracture is solved by the finite volume method in the solver
SinglePhaseFVM.The solver
SurfaceGeneratordefines the fracture region and rock toughness.
<Hydrofracture
name="hydrofracture"
solidSolverName="lagsolve"
flowSolverName="SinglePhaseFlow"
surfaceGeneratorName="SurfaceGen"
logLevel="1"
targetRegions="{ Fracture }"
maxNumResolves="2">
<NonlinearSolverParameters
newtonTol="1.0e-5"
newtonMaxIter="20"
lineSearchMaxCuts="3"/>
<LinearSolverParameters
directParallel="0"/>
</Hydrofracture>
<SolidMechanicsLagrangianFEM
name="lagsolve"
discretization="FE1"
targetRegions="{ Domain, Fracture }"
contactRelationName="fractureContact"
contactPenaltyStiffness="1.0e0"/>
<SinglePhaseFVM
name="SinglePhaseFlow"
discretization="singlePhaseTPFA"
targetRegions="{ Fracture }"/>
<SurfaceGenerator
name="SurfaceGen"
targetRegions="{ Domain }"
nodeBasedSIF="1"
initialRockToughness="10.0e6"
mpiCommOrder="1"/>
Events
For the case with EmbeddedFractures solver, we add multiple events defining solver applications:
an event specifying the execution of the
EmbeddedSurfaceGeneratorto generate the fracture elements.a periodic event specifying the execution of the embedded fractures solver.
three periodic events specifying the output of simulations results.
<Events
maxTime="1.0">
<SoloEvent
name="preFracture"
target="/Solvers/SurfaceGenerator"/>
<PeriodicEvent
name="solverApplications"
beginTime="0.0"
endTime="1.0"
forceDt="1.0"
target="/Solvers/mechSolve"/>
<PeriodicEvent
name="outputs"
targetExactTimestep="0"
target="/Outputs/vtkOutput"/>
<PeriodicEvent
name="timeHistoryCollection"
timeFrequency="1.0"
targetExactTimestep="0"
target="/Tasks/displacementJumpCollection" />
<PeriodicEvent
name="timeHistoryOutput"
timeFrequency="1.0"
targetExactTimestep="0"
target="/Outputs/timeHistoryOutput"/>
</Events>
Similar settings are applied for the other two cases.
Mesh, material properties, and boundary conditions
Last, let us take a closer look at the geometry of this simple problem, if using EmbeddedFractures solver.
We use the internal mesh generator to create a large domain
( ), with one single element
along the Z axes, 121 elements along the X axis and 921 elements along the Y axis.
), with one single element
along the Z axes, 121 elements along the X axis and 921 elements along the Y axis.
<Mesh>
<InternalMesh
name="mesh1"
elementTypes="{ C3D8 }"
xCoords="{ -20, -4, 4, 20 }"
yCoords="{ -20, -4, 4, 20 }"
zCoords="{ 0, 1 }"
nx="{ 10, 101, 10 }"
ny="{ 10, 901, 10 }"
nz="{ 1 }"
cellBlockNames="{ cb1 }"/>
</Mesh>
The mesh for the case with LagrangianContact solver was also created using the internal mesh generator, as parametrized in the InternalMesh XML tag. The mesh discretizes the same compational domain () with 300 x 300 x 2 eight-node brick elements in the x, y, and z directions respectively.
<Mesh>
<InternalMesh
name="mesh1"
elementTypes="{ C3D8 }"
xCoords="{ -20, -2, 2, 20 }"
yCoords="{ -20, -2, 2, 20 }"
zCoords="{ 0, 1 }"
nx="{ 40, 220, 40 }"
ny="{ 40, 220, 40 }"
nz="{ 2 }"
cellBlockNames="{ cb1 }"/>
</Mesh>
Similarly, the internal mesh generator was used to discretize the same domain () and generate the mesh for the case with Hydrofracture solver, which contains 280 x 280 x 1 eight-node brick elements in the x, y, and z directions.
<Mesh>
<InternalMesh
name="mesh1"
elementTypes="{ C3D8 }"
xCoords="{ -20, -2, 2, 20 }"
yCoords="{ -20, -2, 2, 20 }"
zCoords="{ 0, 1 }"
nx="{ 40, 200, 40 }"
ny="{ 40, 200, 40 }"
nz="{ 1 }"
cellBlockNames="{ cb1 }"/>
</Mesh>
In all the three cases, eight-node hexahedral elements are defined as C3D8 elementTypes, and their collection forms a mesh
with one group of cell blocks named here cb1.
Refinement is necessary to conform with the fracture geometry specified in the Geometry section.
The parameters used in the simulation are summarized in the following table.
Symbol
Parameter
Units
Value
Bulk modulus
[GPa]
16.7
Shear modulus
[GPa]
10.0
Fracture length
[m]
2.0
Fracture pressure
[MPa]
-2.0


Note that the internal fracture pressure has a negative value, due to the negative sign convention for compressive stresses in GEOS.
Material properties and boundary conditions are specified in the Constitutive and FieldSpecifications sections.
Adding a fracture
The static fracture is defined by a nodeset occupying a small region within the computation domain, where the fracture tends to open upon internal pressurization:
The test case with EmbeddedFractures solver:
<Geometry>
<Rectangle
name="FracturePlane"
normal="{1.0, 0.0, 0.0}"
origin="{0.0, 0.0, 0.0}"
lengthVector="{0.0, 1.0, 0.0}"
widthVector="{0.0, 0.0, 1.0}"
dimensions="{ 2, 10 }"/>
</Geometry>
The test case with LagrangianContact solver:
<Geometry>
<Rectangle
name="fracture"
normal="{1.0, 0.0, 0.0}"
origin="{0.0, 0.0, 0.0}"
lengthVector="{0.0, 1.0, 0.0}"
widthVector="{0.0, 0.0, 1.0}"
dimensions="{ 2, 10 }"/>
<Rectangle
name="core"
normal="{1.0, 0.0, 0.0}"
origin="{0.0, 0.0, 0.0}"
lengthVector="{0.0, 1.0, 0.0}"
widthVector="{0.0, 0.0, 1.0}"
dimensions="{ 2, 10 }"/>
</Geometry>
The test case with HydroFracture solver:
<Geometry>
<Box
name="fracture"
xMin="{ -0.01, -1.01, -0.01 }"
xMax="{ 0.01, 1.01, 1.01 }"/>
<Box
name="source"
xMin="{ -0.01, -0.11, -0.01 }"
xMax="{ 0.01, 0.11, 1.01 }"/>
<Box
name="core"
xMin="{ -0.01, -10.01, -0.01 }"
xMax="{ 0.01, 10.01, 1.01 }"/>
</Geometry>
To make these cases identical to the analytical example, fracture propagation is not allowed in this example.
Time history function
In the Tasks section, PackCollection tasks are defined to collect time history information from fields.
Either the entire field or specified named sets of indices in the field can be collected.
In this example, a task is specified to output fracture aperture (normal opening); however, for different solvers, different fieldName and objectPath should be called:
The test case with EmbeddedFractures solver:
<Tasks>
<PackCollection
name="displacementJumpCollection"
objectPath="ElementRegions/Fracture/embeddedSurfaceSubRegion"
fieldName="displacementJump"
setNames="{all}"/>
</Tasks>
The test case with LagrangianContact solver:
<Tasks>
<PackCollection
name="displacementJumpCollection"
objectPath="ElementRegions/Fracture/faceElementSubRegion"
fieldName="displacementJump"/>
</Tasks>
The test case with Hydrofracture solver:
<Tasks>
<PackCollection
name="apertureCollection"
objectPath="ElementRegions/Fracture/faceElementSubRegion"
fieldName="elementAperture"/>
</Tasks>
These tasks are triggered using the Event manager with a PeriodicEvent defined for these recurring tasks.
GEOS writes output files named after the string defined in the filename keyword and formatted as HDF5 files.
The TimeHistory file contains the collected time history information from each specified time history collector.
This information includes datasets for the simulation time, element center defined in the local coordinate system, and the time history information.
A Python script is used to read and plot any specified subset of the time history data for verification and visualization.
Running GEOS
To run these three cases, use the following commands:
path/to/geos -i inputFiles/efemFractureMechanics/Sneddon_embeddedFrac_verification.xml
path/to/geos -i inputFiles/lagrangianContactMechanics/ContactMechanics_Sneddon_benchmark.xml
path/to/geos -i inputFiles/hydraulicFracturing/Sneddon_hydroFrac_benchmark.xml
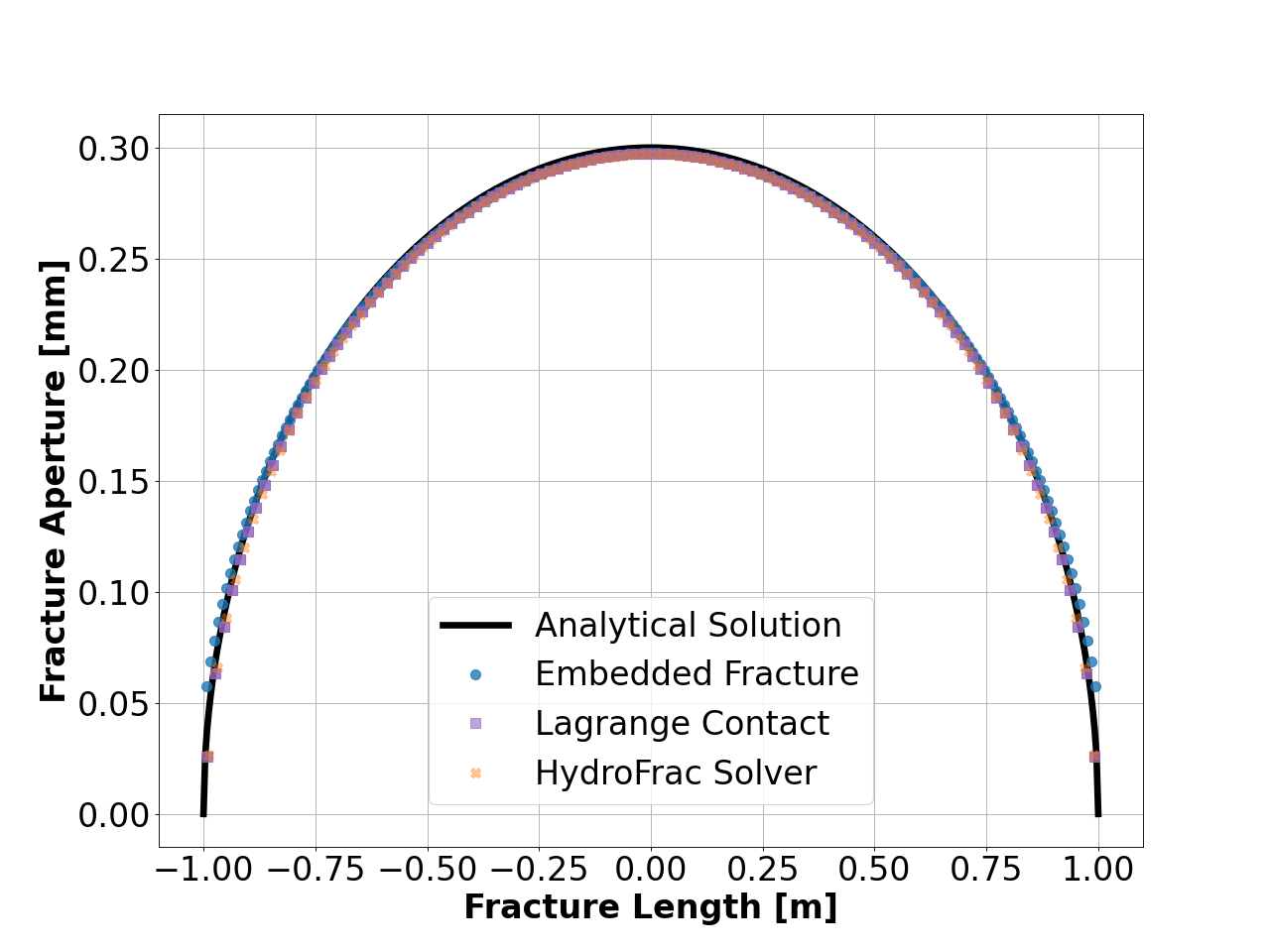
Inspecting results
This plot compares the analytical solution (continuous lines) with the numerical solutions (markers) for the normal opening of the pressurized fracture. As shown below, consistently, numerical solutions with different solvers correlate very well with the analytical solution.
To go further
Feedback on this example
This concludes the Sneddon example. For any feedback on this example, please submit a GitHub issue on the project’s GitHub page.